阅读:0
听报道
我们在上一章已经提到,相比当前人工智能动辄数百层,包括人类在内的动物大脑皮层至多六层。这每层都还是不一样的(图2.1)。其中的细节我们在介绍完神经元以后再进一步理解。每个神经元都是一个相对独立的计算单元,其中的信息并不会轻易被覆盖。
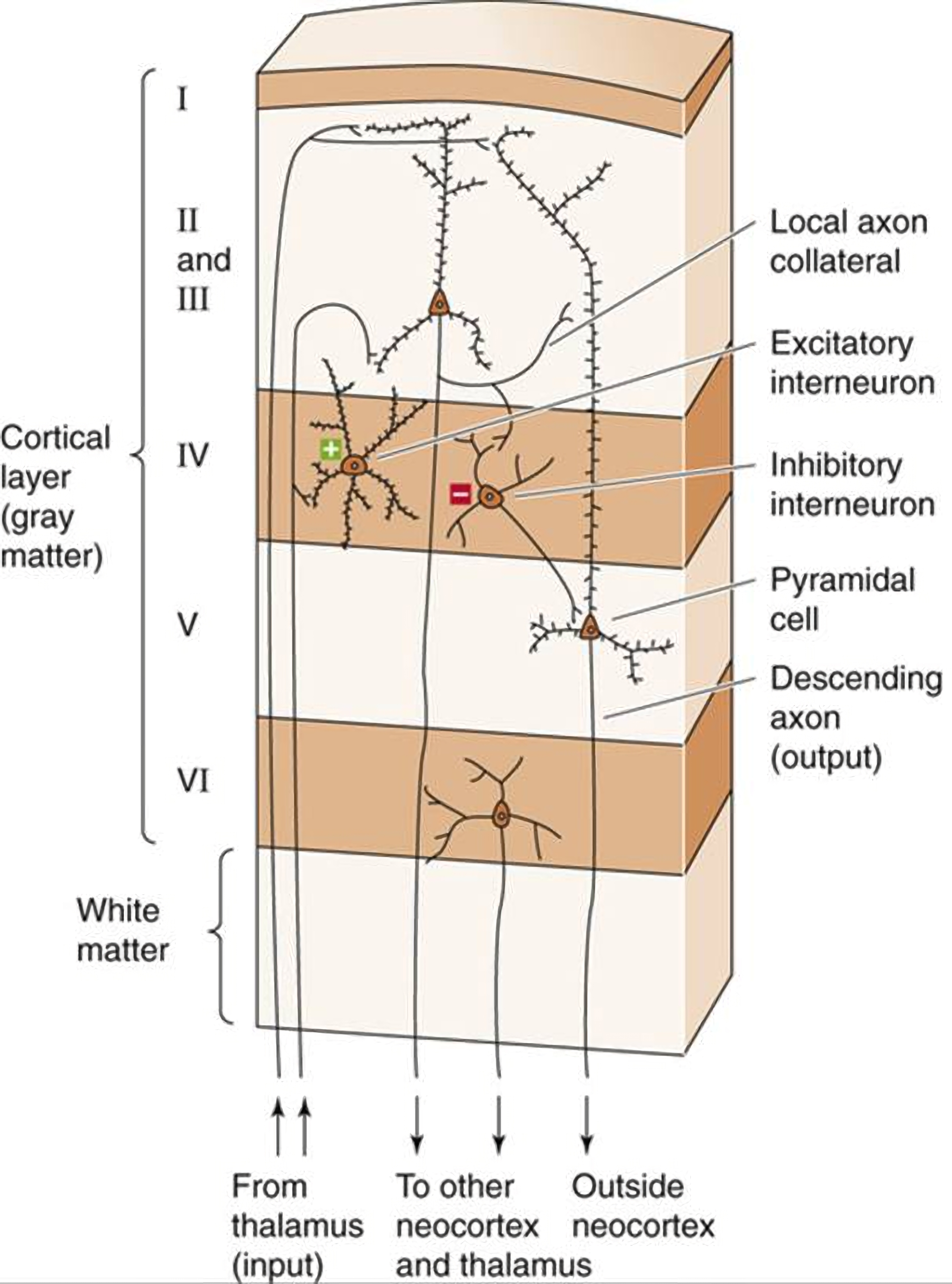
图2.1 哺乳动物大脑皮层分为六层。来自丘脑的信号到达第I和第IV层,而第V、第VI层负责汇总和输出。来自[1]。
除了“神经元”层数,另一个在人工智能领域经常被提及的数字是神经元数目。人脑目前预估包含约一千亿个细胞,一立方毫米神经元间的突触连接数为1.5亿个[2],然而绝大多数时候,在大脑工作时这些突触不会激活。而对于大语言模型,例如DeepSeek V3,就已包含了6710亿个参数,还只能处理文本数据。大模型在推理时,不考虑量化,参数稀疏化等优化,使用基础的全参数推理,需要将所有参数载入内存,从而导致消耗的算力及能量巨大,更不必说训练时所消耗的海量能量。
上述对神经系统细胞数和大模型的初步比较,虽无法完全解释大脑低能耗的原因,但可以启发进一步的思考。例如意识到在某些特定的任务上,可以使用少量神经元组成的脉冲神经网络,以5层总计28000个神经元组成的模型,做到比GPU快64倍,且以低至1瓦的能耗完成无人机基于视觉信号的飞控和导航[5]。
相比而言,大脑的能耗还是低了数量级的。葡萄糖是大脑首选的能量物质。仅占成年人体重2%的大脑就消耗了人体静息状态下约20%的能量;其中一半由钠钾泵消耗,维持了神经元的膜电位[3,4]。这能量摄入要求也是我们说很多野生动物用脑不能太奢侈的一大原因。
大脑中的新皮层(在小鼠中常被称为等皮层isocortex),因其在人类中的显著扩张而得名,包含前额叶皮层。相比大脑中较老的部分,例如包含三层神经元的海马区,新皮层的特征是其包含6层神经元。当前人工神经网络所采用的分层算法受到了20世纪60年代神经科学发现的启发,特别是关于视网膜中神经元分层的研究。
人工智能受到神经网络影响最深的一点体现在反向传播算法。然而大脑中大多数神经元间的连接并不遵循反向传播(反应最快的中间神经元--表达小清蛋白的中间神经元(PV interneurons),有反向传播)。大脑皮层的每一层都具有不同的功能和结构特征(图2.1),不同于人工智能中简单地添加具有相同结构的隐藏层。
人工智能中用到的反向传播就像是确定一个公司集团的年度目标,根据总目标在组成公司及其部门之间划分出一个个子目标,各部门预估自己能完成的情况再反馈要求调整自己的目标,这一过程和大脑皮层中的信息传播有着本质的区别,两者的差别,是本书反复出现,试图回答的核心问题。
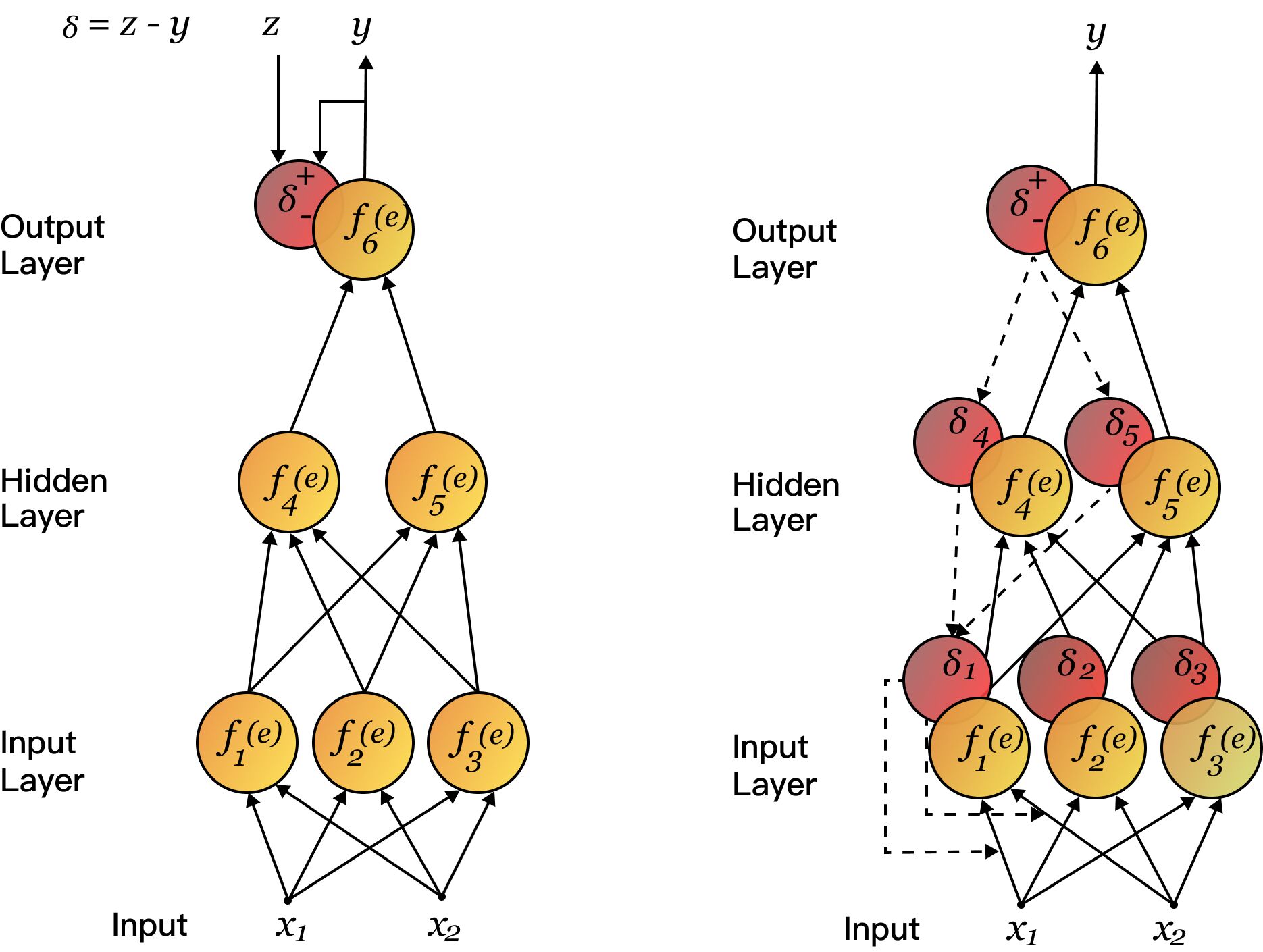
图2.2 在一个简单的三层网络中的反向传播。神经元的输出在各层中向前传播,并被求和以预测y。这个y和目标z之间的不同,通过上一层传回,这导致修改权重后,重新对输入加权向前传播,并再次比较。算法通过梯度下降法使得训练后的神经网络,在输入和输出间更准确地拟合。
与传统神经网络把权重放在各层神经元上(图2.2)不同,KAN (Kolmogorov-Arnold Network)将计算放到了神经元的连边上,通过对激活函数的训练,使得KAN中的每一层都和其它层不一样。在函数拟合任务上,KAN能够相比传统的多层连接网络以更少的参数和层数逼近目标函数。
参考文献:
[1] Saladin, K. S., Gan, C. A. & Cushman, H. N. Anatomy & Physiology : the Unity of form and Function (McGraw Hill, 2021).
[2] Braitenberg, V. & Schüz, A. Cortex: statistics and geometry of neuronal connectivity. Cortex Stat. Geom. Neuronal Connect (1998) doi: 10.1007/978-3-662-03733-1.
[2] Braitenberg, V. & Schüz, A. Cortex: statistics and geometry of neuronal connectivity. Cortex Stat. Geom. Neuronal Connect (1998) doi: 10.1007/978-3-662-03733-1.
[3] Laughlin, S. B., de Ruyter van Steveninck, R. R. & Anderson, J. C. The metabolic cost of neural information. Nat. Neurosci. 1, 36–41 (1998).
[4] Karbowski, J. Global and regional brain metabolic scaling and its functional consequences. BMC Biol. 5, 18 (2007).
[5] F. Paredes-Vallés, Hagenaars, J. J., J. Dupeyroux, S. Stroobants, Xu, Y., & de, E. (2024). Fully neuromorphic vision and control for autonomous drone flight. Science Robotics, 9(90). doi: 10.1126/scirobotics.adi0591
话题:

0
推荐
财新博客版权声明:财新博客所发布文章及图片之版权属博主本人及/或相关权利人所有,未经博主及/或相关权利人单独授权,任何网站、平面媒体不得予以转载。财新网对相关媒体的网站信息内容转载授权并不包括财新博客的文章及图片。博客文章均为作者个人观点,不代表财新网的立场和观点。
 京公网安备 11010502034662号
京公网安备 11010502034662号 {kind=link}